While working on the mechanics, I used proxy geometry. I later replaced it with the final models and smaller details, such as screws and small pieces.
Ostrich
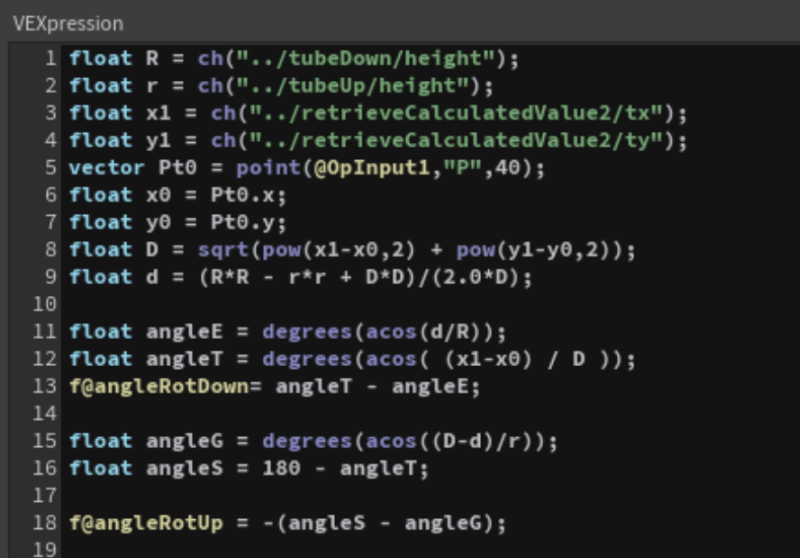
I started with the upper and lower legs of the ostrich by creating a two-point constraint with tubes, then later replaced them with the final geometry. I repeated this for the feet and the bar connected to them
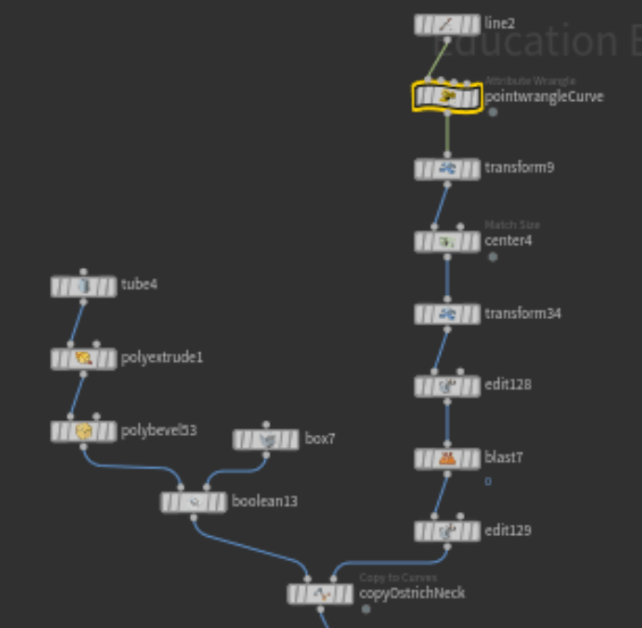
For the ostrich neck, I created a curve using a line node and an attribute wrangle, then copied geometry to the curve
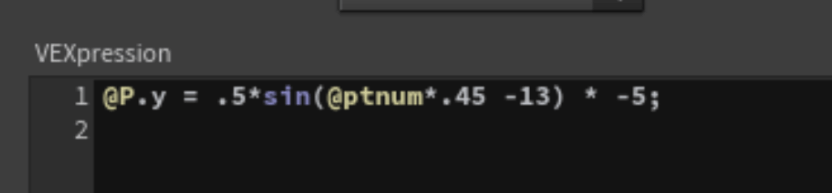
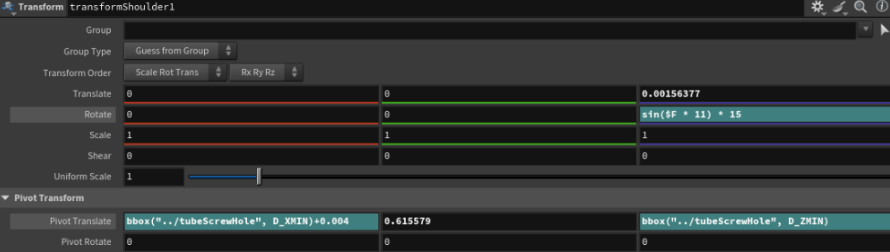
For the neck animation, I used the same sin expression as the person’s shoulder, but with the ½ of each value, to match the shoulder movement
Rope
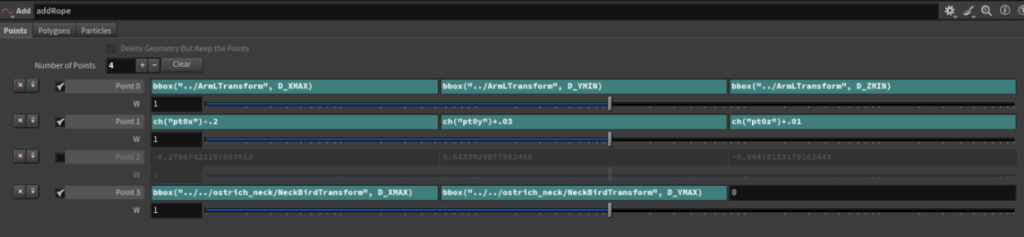
To create the rope, I created a line between the neck and shoulder using an add node. I then used a sweep mesh to give it thickness
Lego Person
Upper body rotation:
Arm Rotation and pivot to the shoulder:
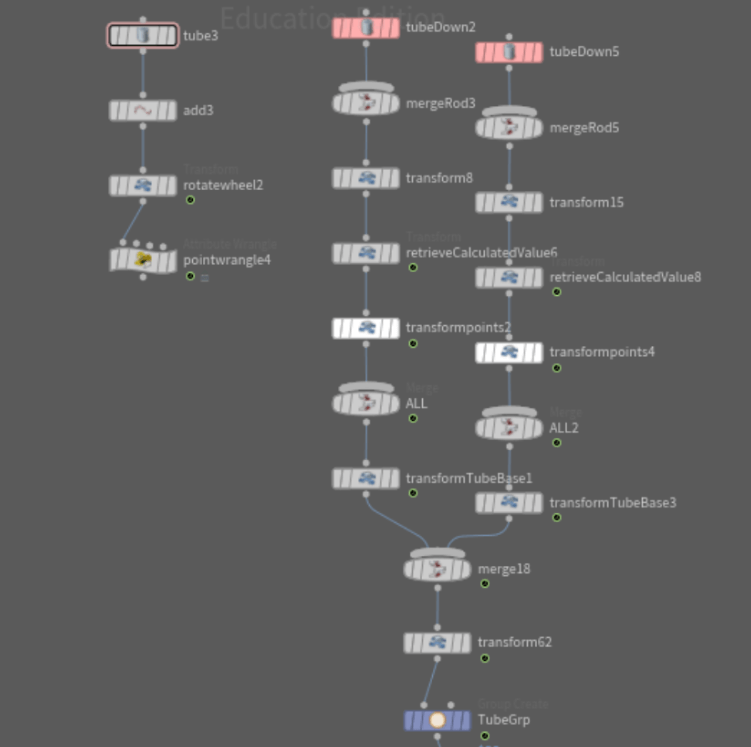
Main Tubes
Using a two-point constraint with the same values as the ostrich leg constraint, the tubes were able to control how the rest of the objects move with the bbox expression. I used this to create the bouncing effect with the ostrich walking.